Copland
Semantics, languages and tools for layered attestation
- Tampering Paper
- Copland Collection Updated
- CHASE Tutorial Updated
- Maat Released
- CHASE Tutorial Added
- Flexible Mechanisms Paper Published
- Automated Trust Analysis Paper Accepted
- MEMOCODE Paper Accepted
- NFM '21 (Virtual) Conference Presentation
- Copland Collection Released
Publications
Documentation
Software
Blog
Example 3
*bank: @hv[(kim ks ker +~+ avm ks av)
+<+ @ks[av us bmon
+<+ @us[(bmon us extmgr +~+
bmon us bser) +<+ extmgr us exts]]]
With Copland phrases as simple as those from Examples 1 and 2, it seems feasible to perform an analysis by hand. The simple examples previously discussed allow for a clear exposition of the underlying principles of the methodology. However, as soon as we begin to consider more complicated phrases involving numerous components with various dependencies and measurements that can be ordered in many ways, the analysis becomes much more complex and requires automation.
As a concrete example, consider the more complex version of the bank’s attestation problem. Instead of using a special-purpose measurer to simply list installed browser extensions, the bank is willing to accept a list generated by the browser’s extension manager (extmgr). However, the bank is interested in gaining trust in the extension manager which relies on part of the core browser (bser) to function properly. Thus, the bank’s special-purpose browser monitor (bmon) would now be responsible for measuring core parts of the browser code as well as the extension manager. For instance, it could hash elements of core functions needed to properly enumerate the list of extensions. The general-purpose anitvirus software (av) would still be responsible for scanning for malware affecting bmon. For extra assurance, the bank will also request a runtime kernel integrity measurement (kim) of the operating system kernel (ker). For completeness, we imagine the target system has a way to measure av itself from another component avm living in a Hyper-V VM. The above phrase accomplishes the described attestation and the figure below shows its Copland semantics.
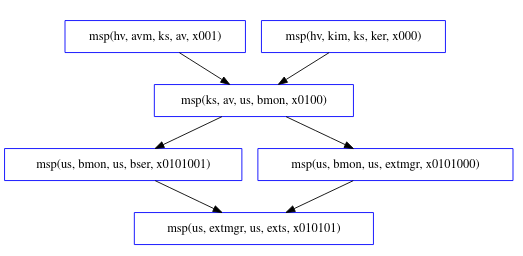
Analysis
The value of automation provided by Chase for analyzing a phrase such as the one in this example becomes quickly apparent. In analyzing this phrase, we assume two dependency relations exist. Specifically we assume that extmgr depends on bser and that av depends on ker. We can see that the .gln we use for this phrase specifies these dependencies.
[ bound = 500, limit = 5000, input_order ]
% Assume adversary avoids detection at our main measurement
% event. Others can be added.
l(V) = msp(us, M, us, exts, X)
=> corrupt_at(us, exts, V).
% Assumptions about system dependencies.
depends(us, C, us, extmgr) => C = bser.
depends(ks, C, ks, av) => C = ker.
depends(us, C, us, bmon) => false.
depends(us, C, us, exts) => false.
depends(us, C, us, bser) => false.
depends(ks, C, ks, ker) => false.
depends(hv, C, hv, kim) => false.
depends(ks, C, ks, avm) => false.
depends(hv, C, hv, avm) => false.
% Axioms stating "deep" components cannot be corrupted:
% This analysis allows all "deep" corruptions, so there are no axioms here.
% Axioms defining which components cannot be recently corrupted:
% This analysis allows all "recent" corruptions, so there are no axioms here.
m4_include(`ex3.gli')m4_dnl
m4_include(`ex3_dist.gli')m4_dnl
m4_include(`thy.gli')m4_dnl
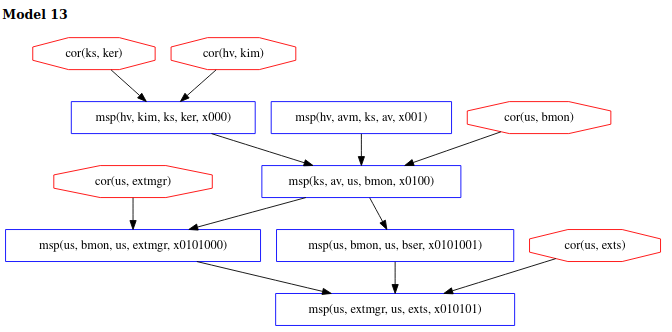
If we submit a query to Chase in which we only stipulate that the corrupt_at assumption holds
for exts when it is measured assuming only that there are no unaccounted for
dependency relationships, we discover 40 distinct ways for the adversary
to avoid detection. Model 13 below shows the scenario where the adversary corrupts several
system components, including kim and ker and avoids detection at exts. All 40 models
are not included in this tutorial but we encourage readers to try to replicate the results for
themselves.
By submitting more constrained queries that make stronger assumptions, we can develop an understanding of what hoops an adversary is forced to jump through in those 40 possibilities. For example, if we additionally assume that neither of the components protected by Hyper-V are corrupted, there are only 24 possibilities, produced with the following .gln.
[ bound = 500, limit = 5000, input_order ]
% Assume adversary avoids detection at our main measurement
% event. Others can be added.
l(V) = msp(us, M, us, exts, X)
=> corrupt_at(us, exts, V).
% Assumptions about system dependencies.
depends(us, C, us, extmgr) => C = bser.
depends(ks, C, ks, av) => C = ker.
depends(us, C, us, bmon) => false.
depends(us, C, us, exts) => false.
depends(us, C, us, bser) => false.
depends(ks, C, ks, ker) => false.
depends(hv, C, hv, kim) => false.
depends(ks, C, ks, avm) => false.
depends(hv, C, hv, avm) => false.
% Axioms defining "deep" components
% We don't want to see models with deep corruptions
l(V) = cor(hv, M) => false.
% Axiom defining which components might be recently corrupted
% This analysis allows all "recent" corruptions, so there are no axioms here.
m4_include(`ex3.gli')m4_dnl
m4_include(`ex3_dist.gli')m4_dnl
m4_include(`thy.gli')m4_dnl
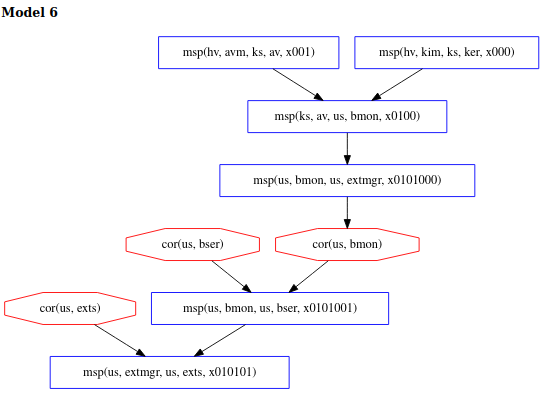
We now observe that model 13 above is no longer possible but scenarios like
in model 6 are still permitted. This result shows that 16 of the 40 original
models contained corrupts of kim and/or avm.
If, instead, we assumed only that no corruptions occur during the attestation (but allow components in Hyper-V to be corrupted) there are now 12 possibilities.
[ bound = 500, limit = 5000, input_order ]
% Assume adversary avoids detection at our main measurement
% event. Others can be added.
l(V) = msp(us, M, us, exts, X)
=> corrupt_at(us, exts, V).
% Assumptions about system dependencies.
depends(us, C, us, extmgr) => C = bser.
depends(ks, C, ks, av) => C = ker.
depends(us, C, us, bmon) => false.
depends(us, C, us, exts) => false.
depends(us, C, us, bser) => false.
depends(ks, C, ks, ker) => false.
depends(hv, C, hv, kim) => false.
depends(ks, C, ks, avm) => false.
depends(hv, C, hv, avm) => false.
% Axioms defining "deep" components
% This analysis allows all "deep" corruptions, so there are no axioms here.
% Axiom defining which components might be recently corrupted
prec(V, V1) & l(V1) = cor(P,C) & ms_evt(V)
=> false.
m4_include(`ex3.gli')m4_dnl
m4_include(`ex3_dist.gli')m4_dnl
m4_include(`thy.gli')m4_dnl
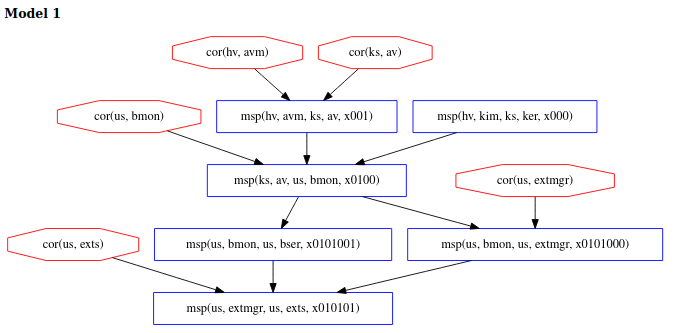
We can see in model 1 below that all the corruptions happen before the
attestation begins and that avm (a hyperviser component) is among the corrupted
components.
Finally, if we assume both that components in Hyper-V are not corrupted and that there are no other corruptions during the attestation, then the adversary cannot succeed and Chase finds no models.
Chase run with our layered attestation theory provides an interactive method for exploring the trust consequnces of Copland phrases. There are often many ways to collect any given set of measurements. By running Chase on the Copland phrases representing the variety of measurement strategies, we can understand the relative strengths and weaknesses among them. The fewer assumptions that need to be made in order to guarantee successful detection of any corruptions, the stronger the Copland phrase. Since there will never be a single solution to fit all use cases, we believe this exploratory approach to analyzing the trustworthiness of layered attestation strategies is an essential capability in designing attestation systems and protocols and in selecting sets of Copland phrases suitable for given situations.
Click here to move on to the last example.