Copland
Semantics, languages and tools for layered attestation
- New Copland Software Release
- Tampering Paper
- Copland Collection Updated
- CHASE Tutorial Updated
- Maat Released
- CHASE Tutorial Added
- Flexible Mechanisms Paper Published
- Automated Trust Analysis Paper Accepted
- MEMOCODE Paper Accepted
- NFM '21 (Virtual) Conference Presentation
Publications
Documentation
Software
Blog
Archive
Example 2
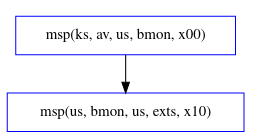
*bank: @ks[av us bmon] +<+ @us[bmon us exts]
This Copland phase is nearly identical to example 1 but for one critical distinction: av’s measurement of bmon is now required to occur before bmon can measure exts. This is indicated by the < operator joining the two measurements. We can see the precedence relationship in the figure below where the arrow represents the ordering of the events.
The following models are produced inaccordance with ex2.gln.
[ bound = 500, limit = 5000, input_order ]
% Assume adversary avoids detection at our main measurement
% event. Others can be added.
l(V) = msp(us, M, us, exts, X)
=> corrupt_at(us, exts, V).
% Assumptions about system dependencies.
depends(ks, C, ks, av) => false.
depends(us, C, us, bmon) => false.
depends(us, C, us, exts) => false.
% Axioms defining stating "deep" components cannot be corrupted:
% This analysis allows all "deep" corruptions, so there are no axioms here.
% Axiom defining which components might be recently corrupted:
% This analysis allows all "recent" corruptions, so there are no axioms here.
m4_include(`ex2.gli')m4_dnl
m4_include(`ex2_dist.gli')m4_dnl
m4_include(`thy.gli')m4_dnl
Note, the set of assumptions in ex2.gln are the same as ex1, the only difference are the include statements at the bottom to link in the correct files.
Analysis
Using the new phrase and the .gln file above, Chase produces two models.
Model 1 shows the case of the adversary performing a recent corruption of
bmon in the narrow timeframe between the first measurement of bmon by av and
the second measurement of exts by bmon.
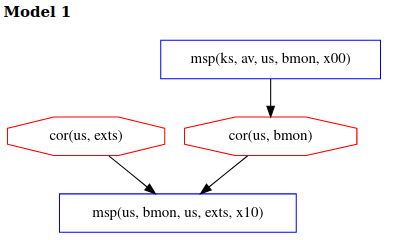
Model 2 shows the case of the adversary performing a deep corruption of av.
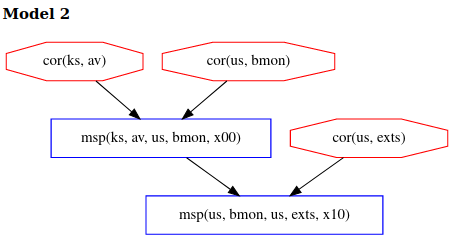
In both model 1 and 2, adversary actions are constrained more than in example 1 since we no longer obtain 3 models and the adversary now has to choose between two difficult corruption strategies. Delaying av’s measurement now provides no advantage to the adversary in this topology, as this will also delay bmon’s measurement. In order to avoid detection at exts, the adversary now has two choices: corrupt av and bmon before the attestation begins or else corrupt bmon after it is measured by av but before it measures exts. Thus, to avoid detection, the adversary must choose between a deep corruption of av or a recent corruption of bmon, both of which are hard. Prior theoretical work has shown this to be a general feature of bottom-up measurement topologies like this one, in which deeper components measure shallower ones before they perform their own measurements. The bank should choose this topology because it maximally constrains the adversary.
Click here to move on to a variation of this example.